




Артикул:
a5713(Один из) основных аппаратных ресурсов управления движением (1) высокоскоростная связь Ethernet в режиме реального времени 100 м (iLink), поддерживаемая беспроводной связью wifirouter; (2) Максимум, им можно управлять одновременно: 8-осевой серводвигатель или шаговый двигатель; (2) режим вывода импульса + направление или прямого импульса + отрицательный импульс является необязательным; Разностный/односторонний выход (с открытым коллектором) опционально; (3) Общие 32 глобальных входа переключателя и каждый вход axis6Switch, включая положительный и отрицательный вход концевого выключателя, вход исходного переключателя, датчик переключения, сервосигнал тревоги и сервопривод входной сигнал на месте; (4) Общий выход 48-го переключателя; Максимально допустимый ток составляет 500 мА; Он может напрямую управлять реле с небольшим током; электромагнитный клапан и т.д.。Среди них: 16 Вы можете установить состояние включения-выключения при начальном включении питания; (5) Каждая ось имеет входной интерфейс энкодера, включение сервопривода, сброс сервопривода, интерфейс сигнализации сервопривода на месте; (6) Интерфейсы 1ауксилиарного энкодера, могут использоваться для подключения электронного маховика, решетчатой линейки и другого ортогонального оборудования энкодера; (7) Входы 1Stop switch,Он может быть использован для того чтобы соединить выключатель аварийной остановки。 (Два) основных показателей (1)100MReal время подключения к сети Ethernet,оборудования только протокола процессор,коммуникации в малых as50uS,четырехместный калибровки мониторинг,обеспечения надежности;хост может быть подключен в большинстве на том же time64Set контрольная карта(расширения через переключатель); (2)управления движением цикла:1 мс; (3)highest8Axis независимый или синхронный/интерполяции движения управления; (4)максимальная частота импульса на выходе: 6мгц; (5)Максимальная входная частота encoder6MHz; (6)32-разрядные команды и дальность обратной связью по положению(пульс); (7)установки Ошибка: ≤ 1 импульс; (8)разрешение скорость команду(ошибки):менее than0.002% (9)48-битный высокоточный электронный передаточное число; (10)inside48Bit расчет и обработка; (11)событие инструкции время обработки (12)высокоинтегрированный однокристальный центр управления, высокая надежность системы; (13)все входные и выходные сигналы изолированы, высокая скорость сигнала: 2,5 кв СКЗ,ввода/вывода:РМС 3.5 КВ,обладает высокой анти-помех способность; (14)все входы находятся подвергается цифровой фильтрации; (15)Все входы и выходы непосредственно связаны с theEIA/ТИА-422Differential пара or24VLevel и контроллер,повысить способность анти-помех сигнала; (16)поддержка4~100Character пользовательских шифрования,защите прав на интеллектуальную собственность системных интеграторов; (17)поддержка удаленного обновления прошивки; (18)несколько из этих осей могут быть настроены на высокий accuracyPWMoutput,несколькими выходными режимами, пожалуйста, свяжитесь с нашим инженером для деталей; (19)Библиотека supportWINDOWSPlatform andWinCEEmbedded операционной системе,ComposablePC+управление движением карты или промышленный планшет+система управления движением карты,связи Ethernet принят между ними。Если necessaryWinCEFunction библиотека под платформой, пожалуйста, свяжитесь со службой поддержки。 (Три) основные функции управления 1. Каждая ось поддерживает линейную и кольцевую осей。 2. Каждая ось поддерживает планирование движения в двух координатной системы: Основные координат systemMCSAnd дополнительные координатные systemPCS。 В процессе движения на основные системы координат,точка-точка или непрерывного движения скорость во вспомогательной системе координат могут быть наложены одновременно。 3. преемственность(скоростью)。 движения(1)поддерживает одновременное существование мастеров、постоянную скорость движения в двух вспомогательных систем координат; (2)расширенный intelligenceSSpeed кривая управление, более плавное ускорение и замедление; (3)Процесс скорости наращивания и достижения целевой скорости может быть синхронизирована с другими переменными, такие как синхронно с перемещением или с временными; 4. Медленно (ТРУСЦОЙ); 5. движение от точки к точке (1) Поддерживайте движение от точки к точке в двух системах координат одновременно.время, Реализует движение в суперпозиции; (2) Поддерживает определение движущихся объектов по абсолютному положению и относительному расстоянию; (3) Поддерживает обычный режим и режим отслеживания. (4) Расширенный интеллектуальный алгоритм планирования ускорения и замедления. (Поддерживает асимметричное ускорение и замедление.) В процессе движения положение цели или скорость движения могут быть изменены произвольно. (5) Движение может быть временно приостановлено. (6) Электронный механизм переключения передач。 (1) Передаточное отношение 48 бит, Обеспечивает высокоточную передачу передач, погрешность составляет менее одной единицы минимального перемещения. (2) Ведомый вал может следовать различным командным значениям положения ведущего вала,или значению обратной связи энкодера. (3) Он поддерживает свободное и синхронное включение.,При включении приводной вал может находиться в ускоренном или равномерном движении. (4) Передаточное число может быть изменено в любое время. (После изменения передаточного отношения) Новая скорость передачи может быть достигнута свободно или синхронно. (5) После отключения существует два режима работы: Запуск на исходной скорости передачи или заданной скорости (Или замедление и остановка). (6) Поддерживает свободные и синхронные процессы отключения. (7) Это может сочетаться с инструкцией по событию. (Гибкое синхронное движение). (8) Движение от точки к точке во вторичной системе координат может накладываться, пока движение электронного редуктора отключено. выполнено. 7. Электронное движение маховика. 8. нелинейное синхронное движение по времени /смещению. 9. Интерполяционное перемещение. (1) Поддержка двух интерполяционных пространств для выполнения интерполяционного движения одновременно. (Другими словами, две группы осей выполняют интерполяционное движение одновременно.); (2) Каждое интерполяционное пространство поддерживает 1axes ~ непрерывную линейную интерполяцию по всем осям. (Высокоскоростная и высокоточная интерполяция внутреннего оборудования.); (3) Каждое интерполяционное пространство имеет буфер большой емкости. (Поддерживает непрерывную интерполяцию массивных микролинейных сегментов. (4) При переходе между сегментами используется технология слияния третьего порядка. (Влияние гладкого крошечного линейного сегмента во время перехода.); (5) Поддержка любой двухосевой дуговой интерполяции; (6) Поддерживается спиральная интерполяция; (7) Поддержка двухосевой дуги + некоторая осевая интерполяция,Линейная ось продвигается пропорционально относительно траектории дуги; (8) Инструкции по записи параметров могут быть вставлены между сегментами интерполяции, инструкцией по работе с битом, ожиданием инструкций, инструкцией по событию, гибкой реализацией сложного синхронного движения, asI / OSynchronization с траекторией движения и т.д.; (9) Может быть задана скорость движения и конечная скорость каждого сегмента; (10) Для каждой оси могут быть установлены относительные или абсолютные координаты; (11) Сегменты линии могут быть выбраны на основе x, Y, Z для планирования скорости,Скорость также может быть спланирована на основе расстояния перемещения по одной оси; Сегмент дуги на основе скорости планирования траектории дуги; (12) Передаточное число скоростей может быть изменено в режиме реального времени; Передаточное число скоростей может быть больше 1, или меньше 1; (13) Интерполяцию можно приостановить/продолжить. (10). Перемещение контура. Перемещение контура относится к вычислению точечных данных главным компьютером.Интерполяция программного обеспечения хоста) ,Выполняется плавная подгонка и точная интерполяция fromimc.。 Разработанный пользователем алгоритм интерполяции.。 11. Поиск и установка механического источника (Возврат к нулю)。 (1) Поддержка трех типов механического оборудования: A.modname=ckeditor
| Происхождение | Материковый Китай |
основной материал: алюминий название продукта: чехол для троса вес: 28 г / комплект основной цвет: серебристый тон габаритные размеры: 7 x 5 x 3 мм/0,28 дюйма x 0,2 дюйма x 0,12 дюйма (д
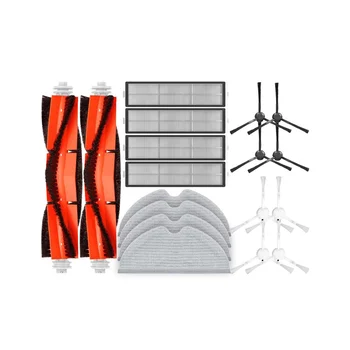
1. абсолютно новые высококачественные материалы, добротно изготовленные, долговечные и идеально сочетающиеся с оборудованием. 2. поддерживайте в чистоте аксессуары для домашнего робота.содержимое
острые лезвия из нержавеющей стали с внутренней поверхностью обеспечивают быстрое и равномерное шлифование, долговечность и легкую очистку. простота в использовании: засыпьте фасоль
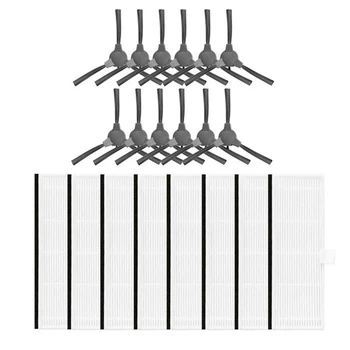
и высокое качество изготовлен из высококачественных материалов, более прочный боковая щетка позволяет вашему пылесосу проникать внутрь для более тщательной очистки фильтр фильтрует мелкую
источник питания: 220 в, 50 гц мощность освещения: ≤1,5 вт * 2 объем выхлопных газов: ≥22 м3/мин материал панели: закаленное стекло тип переключателя: сенсорный переключатель + инфракрасный
1. абсолютно новые высококачественные материалы, качественно сделанные, долговечные и полностью соответствующие оригинальному оборудованию. 2. чистые аксессуары обеспечивают максимальную
моющаяся роликовая щетка для стиральной машины для пола tineco one floor s7/s7pro запчасти для беспроводного пылесоса изготовлена из высококачественного материала, долговечна и практична в использовании. с
modname=ckeditor материнская плата giant kone elevator kone lce cpu40 km773383h06 km773380g04
поддержка дропшиппинга и оптовой продажи. 100% оригинал и высокое качество с бесплатной гарантией после продажи. прочная и гибкая гофрированная конструкция: в шланг встроен полипропиленовый
добро пожаловать в наш магазин. наши товары имеют доступные цены и хорошее качество.мы поддерживаем дропшиппинг и оптовую продажу.если вы хотите работать с нами в течение длительного
инструмент для чистки углов: этот щелевой инструмент является дополнительным инструментом для чистки углов, чтобы сэкономить ваши силы и очистить промежутки между мебелью, двигателями, полом,
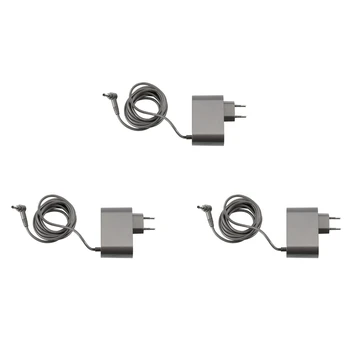
100% абсолютно новый и высококачественный изготовлен из высококачественного материала, более прочный. подходит для dyson v10, v11 выход: 30,45 в/1,1 а вход: 100-240 в ~ 50/60 гц 1,0 а тип вилки:
для ecovacs deebot ozmo t8 / t8 +/ t8 aivi; для аксессуаров для осциллирующей швабры ecovacs ozmo pro это усовершенствованные прокладки для швабры из микрофибры, которые можно стирать и использовать повторно
название продукта: внутренняя чаша рисоварки подходящая модель: рисоварка endever mc-77m
совершенно новые высококачественные материалы, хорошо обработанные, долговечные и полностью совместимые с оборудованием. чистые аксессуары обеспечивают наилучшую производительность
1. абсолютно новые высококачественные материалы, добротно изготовленные, долговечные и идеально сочетающиеся с оборудованием. 2. поддерживайте в чистоте аксессуары для домашнего робота.содержимое






























Добавить отзыв
Ваш адрес электронной почты опубликован не будет. Обязательные поля отмечены *